

Tres innovadoras soluciones robóticas para manipular carne, pescado y fruta sin dañarlos. Es el resultado del proyecto europeo AGILEHAND, en el que un equipo del Instituto ai2 ha estado trabajando durante los últimos dos años en colaboración con el CIGIP (Centro de investigación en gestión e ingeniería de producción), dentro de la UPV, así como diversas universidades y empresas europeas.
En concreto, el equipo del ai2 ha estado centrado en tres casos de uso en colaboración con las empresas Marelec y Multiscan. Con la primera, especializada en soluciones de alta tecnología para el procesamiento de alimentos, ha incorporado el sistema de garras robóticas blandas desarrolladas en los laboratorios de la CPI a un robot que es capaz de disponer de forma alineada las pechugas de pollo en la propia cinta transportadora de la cadena de producción.
En otra línea de trabajo, los investigadores del ai2 han logrado desarrollar un sistema robótico equipado con las mismas garras de dedos flexibles y capaz de ordenar dentro de la caja de empaquetado los trozos de carne sin dañar el alimento. El desarrollo permite ganar tiempo en un proceso que en la actualidad se realiza manualmente en las empresas alimentarias. Carlos Blanes, investigador del Instituto ai2, explica que “las garras han sido diseñadas con lo que se denomina tecnología de soft robotics, es decir, que no contienen articulaciones rígidas, motivo por el que resultan especialmente adecuadas en entornos de colaboración humano-robot. Además, los materiales utilizados son compatibles bajo las normativas de manipulación de alimentos y, al estar fabricadas por impresión 3D, permiten realizar rediseños rápidos adecuándose a las necesidades del producto”, añade el investigador.
Clasificación de naranjas y limones
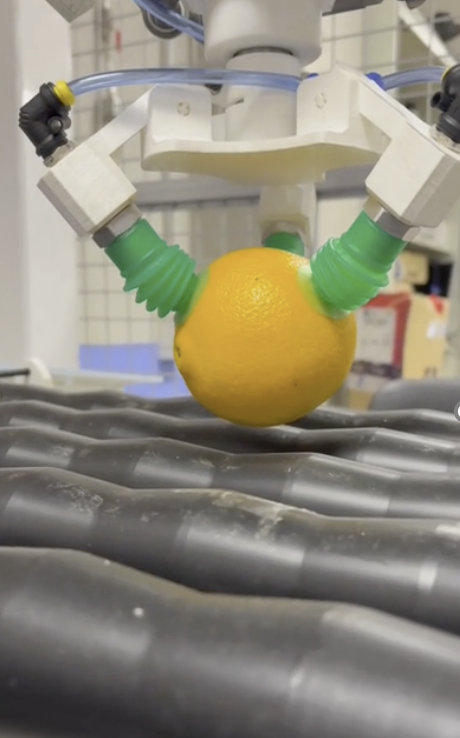
Por otro lado, en colaboración con la empresa Multiscan, experta en desarrollo de equipos de visión artificial para la selección e inspección de frutas y hortalizas, el grupo de investigadores del Instituto ai2 ha colaborado en el diseño de un sistema robótico para la manipulación de naranjas. El brazo robótico Delta con el que han trabajado incorpora un sistema de succión de tres puntos en vez de uno, cosa que le permite trabajar a más velocidad, así como un sistema de visión por computador capaz de determinar en qué punto se encuentra la naranja y desde qué ángulo es más seguro agarrar el alimento. “El equipo de investigadores que hemos trabajado en el proyecto ha realizado diversas pruebas de laboratorio con las que hemos alcanzado cadencias de trabajo altas, cercanas a las que se trabajan en líneas reales de clasificado de naranjas”, explica Francisco Blanes, investigador principal del AGILEHAND en el ai2.
En el proyecto AGILEHAND también han participado la Universidad Politécnica delle Marche (Italia), la Tampere University of Applied Sciences de Finlandia, AINIA y diversas empresas punteras del sector alimentario europeo, que han trabajado en otro tipo de soluciones para pescado o frutos rojos.